Stiffness matrix
- For the stiffness tensor in solid mechanics, see Hooke's law#Matrix representation (stiffness tensor).
In the finite element method and in analysis of spring systems, a stiffness matrix, K, is a symmetric positive-semidefinite matrix that generalizes the stiffness of Hooke's law to a matrix, describing the stiffness of between all of the degrees of freedom so that

where F and x are the force and the displacement vectors, and
is the system's total potential energy.
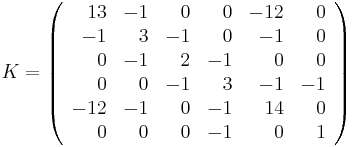
For a simple spring network, the stiffness matrix is a Laplacian matrix (in order to enforce Newton's third law) describing the connectivity graph between degrees of freedom. Off-diagonal entries contain  , the negative stiffness of the spring connecting degree-of-freedom i to j. For example,
, the negative stiffness of the spring connecting degree-of-freedom i to j. For example,
Contents |
Truss Element Stiffness Matrix
The stiffness matrix of a horizontal prismatic truss element is [1] :
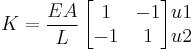
E: modules of elasticity
L: length
A: cross section area
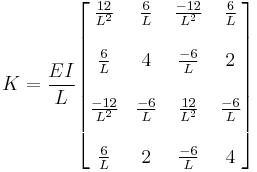
Beam Element Stiffness Matrix
The stiffness matrix of a prismatic two dimensional horizontal beam element with negligible shear and axial deformation is[2] :
 :
:
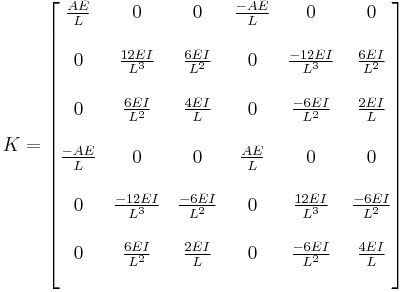
The stiffness matrix of a prismatic two dimensional horizontal beam element with negligible shear deformation is[3] :
 :
:
E: modules of elasticity
I: section moment of inertia perpendicular to page
L: length
See also
References
- ^ McGuire, William; H.Gallagher, Richard; D.Ziemian, Ronald (2000). Matrix Structural Analysis. United States of America: John Wiley & Sons, Inc. pp. 16~18. ISBN 0-471-12918-6. http://www.amazon.com/Matrix-Structural-Analysis-William-McGuire/dp/book-citations/0471129186.
- ^ D.Cook, Robert (1994). Finite Element Modeling for Stress Analysis. United States of America: John Wiley & Sons, Inc. pp. 20~22. ISBN 0-471-10774-3. http://www.amazon.com/Finite-Element-Modeling-Stress-Analysis/dp/0471107743.
- ^ D.Cook, Robert (1994). Finite Element Modeling for Stress Analysis. United States of America: John Wiley & Sons, Inc. pp. 20~24. ISBN 0-471-10774-3. http://www.amazon.com/Finite-Element-Modeling-Stress-Analysis/dp/0471107743.